1 概述
2 安装
1
| sudo apt install ros-jazzy-slam-toolbox -y
|
2.2 安装 nav2
1
2
3
| sudo apt install ros-jazzy-nav2-map-server
sudo apt install ros-jazzy-navigation2
sudo apt install ros-jazzy-nav2-bringup
|
3 使用
3.1 建图
Terminal 1 使用.
1
2
|
ros2 launch robot_pkg robot.launch.py
|
Terminal 2 使用.
1
| ros2 launch slam_toolbox online_async_launch.py
|
Terminal 3 使用.
之后在地图中移动机器人进行建图.
Terminal 4 使用.
然后创建新的功能包, 这里命名为 robot_nav2 保存地图, 在其目录下创建 maps 目录, 进入目录.
1
2
|
ros2 run nav2_map_server map_saver_cli -f room
|
之后生成了
其中 .pgm.
其中 .yaml.
room.yaml 字段说明
1
2
3
4
5
6
7
| image: room.pgm
mode: trinary
resolution: 0.05
origin: [-5.97, -4.95, 0]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.25
|
| 字段 |
示例值 |
含义 |
备注/常见取值 |
image |
room.pgm |
地图灰度图文件名 |
黑=占用,白=空闲,灰=未知 |
mode |
trinary |
地图读写模式 |
常见:trinary / scale / raw |
resolution |
0.05 |
分辨率(米/像素) |
每像素 0.05 m(5 cm/px) |
origin |
[-5.97, -4.95, 0] |
像素 (0,0) 的世界位姿 (x,y,yaw) |
(0,0) 在图像左下角;yaw 单位:弧度 |
negate |
0 |
是否反转黑白 |
0:黑占用/白空闲;1:相反 |
occupied_thresh |
0.65 |
判定为“占用”的阈值 |
主要影响非三值图(mode≠trinary) |
free_thresh |
0.25 |
判定为“空闲”的阈值 |
同上 |
附:常用公式(可选)
| 场景 |
公式/说明 |
灰度→占用概率(negate=0) |
p_occ = (255 - 灰度) / 255 |
| 占用/空闲判定 |
p_occ ≥ 0.65 占用;p_occ ≤ 0.25 空闲;介于两者为未知 |
地图覆盖范围(PGM 尺寸 W×H 像素) |
x ∈ [origin.x, origin.x + W*resolution];y ∈ [origin.y, origin.y + H*resolution] |
3.2 模拟导航
在功能包 robot_nav2 下创建 config 目录, 进入目录.
1
| cp /opt/ros/jazzy/share/nav2_bringup/params/nav2_params.yaml .
|
然后根据需要修改参数, 这里我们目前主要关注 robot_radius, inflation_radius, xy_goal_tolerance, yaw_goal_tolerance.
之后在 launch 目录下, 写入 launch 脚本.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
import os
import launch
import launch_ros
from ament_index_python.packages import get_package_share_directory
from launch.launch_description_sources import PythonLaunchDescriptionSource
def generate_launch_description():
robot_navigation2_dir = get_package_share_directory(
'robot_nav2')
nav2_bringup_dir = get_package_share_directory('nav2_bringup')
rviz_config_dir = os.path.join(
nav2_bringup_dir, 'rviz', 'nav2_default_view.rviz')
use_sim_time = launch.substitutions.LaunchConfiguration(
'use_sim_time', default='true')
map_yaml_path = launch.substitutions.LaunchConfiguration(
'map', default=os.path.join(robot_navigation2_dir, 'maps', 'room.yaml'))
nav2_param_path = launch.substitutions.LaunchConfiguration(
'params_file', default=os.path.join(robot_navigation2_dir, 'config', 'nav2_params.yaml'))
return launch.LaunchDescription([
launch.actions.DeclareLaunchArgument('use_sim_time', default_value=use_sim_time,
description='Use simulation (Gazebo) clock if true'),
launch.actions.DeclareLaunchArgument('map', default_value=map_yaml_path,
description='Full path to map file to load'),
launch.actions.DeclareLaunchArgument('params_file', default_value=nav2_param_path,
description='Full path to param file to load'),
launch.actions.IncludeLaunchDescription(
PythonLaunchDescriptionSource(
[nav2_bringup_dir, '/launch', '/bringup_launch.py']),
launch_arguments={
'map': map_yaml_path,
'use_sim_time': use_sim_time,
'params_file': nav2_param_path}.items(),
),
launch_ros.actions.Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
output='screen'),
])
|
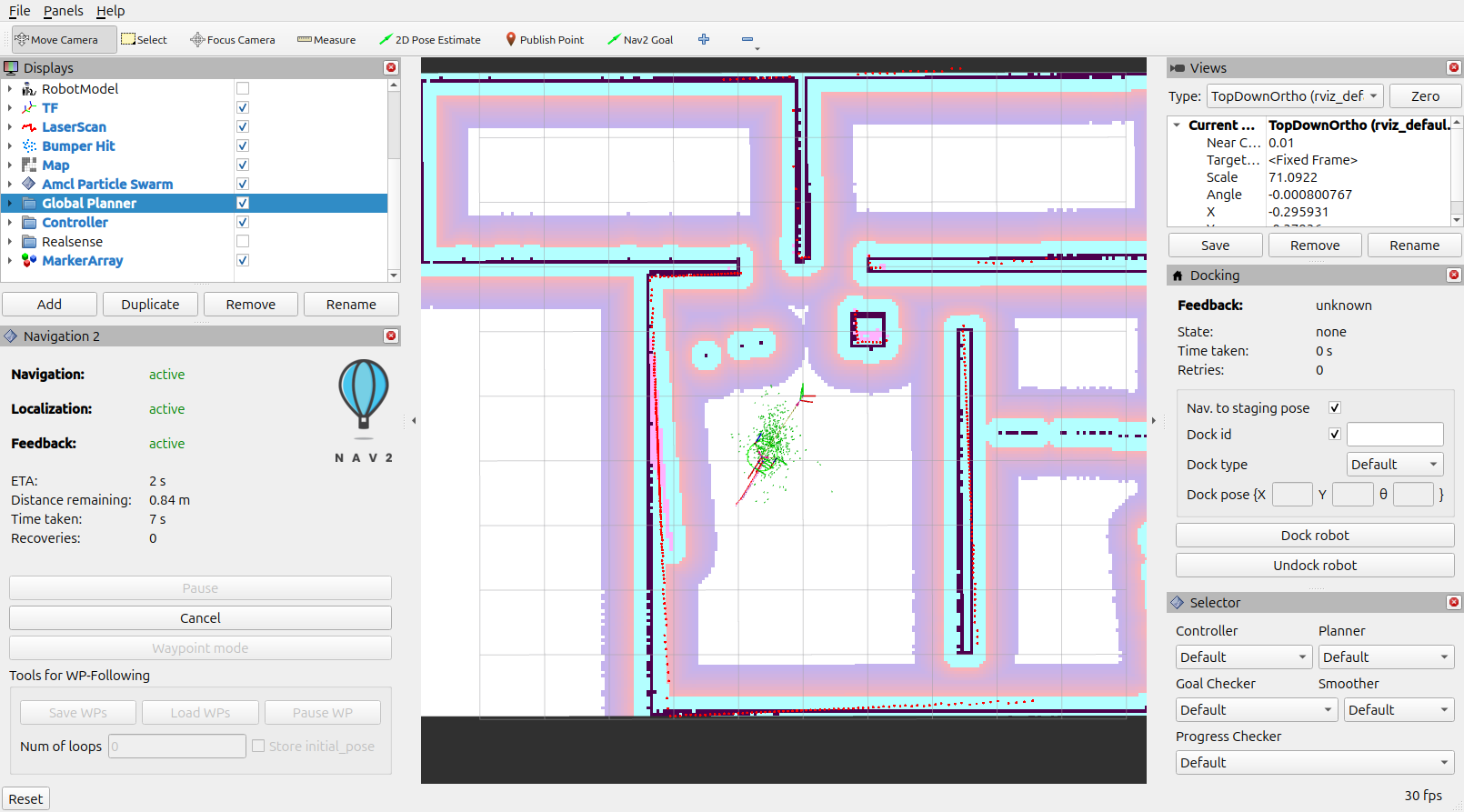
先启动机器人, 再启动该脚本.
单点导航.
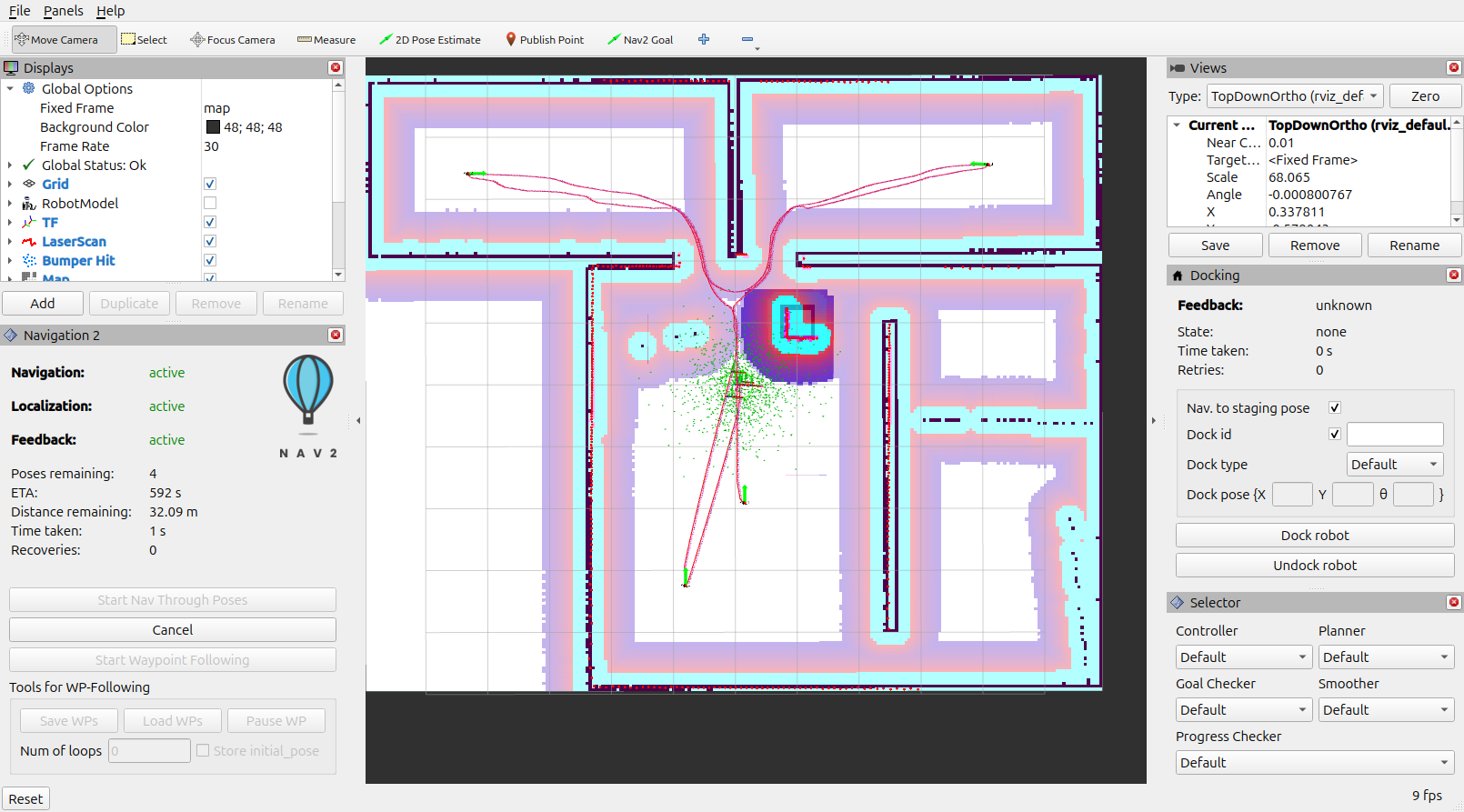
多点导航.
3.3 导航应用开发
在 nav2 中, 机器人的位置信息是由 amcl 节点计算的.
我们可以查看节点的相关信息.
通过对 /initialpose 话题进行发布则可以设置机器人的初始位置.
通过对 navigate_to_pose 动作服务进行处理就可以控制机器人的单点导航.
通过对 follow_waypoints 动作服务进行处理就可以控制机器人的路点导航.
4 References