1 概述 Gazebo 是一个 高保真度的机器人仿真平台,用于在虚拟环境中模拟机器人和其与环境的交互行为.
2 安装 不同版本的安装方式不一样, 这里以 jazzy 为例.
gazebo 主要有 classic 和 Harmonic 两个版本, 我们安装后者.
特性
Gazebo Classic Gazebo Harmonic(或 Ignition Gazebo 系列)
📦 名称
gazebo
ignition-gazebo / gz-sim
🧱 架构
单体架构(monolithic)
模块化(plugin-based、库分离)
🎮 GUI
内嵌在 gazebo 中
独立 GUI(gz-gui)
🌐 网络通信
ROS(直接集成)
ZeroMQ、Ignition Transport(更模块化)
⚙️ 插件
ROS plugin 直连
ROS 需使用 bridge(如 ros_ign_bridge 或 gz-ros2-control)
🧪 状态
维护模式(Gazebo 11 是最后一个版本)
正式接替,持续开发
📅 生命周期
Gazebo 11 维护到 2025
Harmonic 是长期支持版本(LTS)
🛠️ 构建系统
CMake
更现代的 CMake + modular libs
1 2 3 4 5 6 7 8 9 sudo curl https://packages.osrfoundation.org/gazebo.gpg --output /usr/share/keyrings/pkgs-osrf-archive-keyring.gpgecho "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/nullsudo apt-get updatesudo apt-get install gz-harmonicsudo apt install ros-jazzy-gz-*
3 使用 这里给出一个仿真的模板, 这是 gazebo harmonic 版本的.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 from launch import LaunchDescriptionfrom launch.actions import DeclareLaunchArgument, ExecuteProcess, TimerActionfrom launch.substitutions import LaunchConfiguration, Commandfrom launch_ros.actions import Nodefrom launch_ros.parameter_descriptions import ParameterValuefrom ament_index_python.packages import get_package_share_directoryimport osdef generate_launch_description (): pkg_path = get_package_share_directory('my_robot_description' ) default_model_path = os.path.join(pkg_path, 'urdf' , 'robot.xacro' ) default_world_path = os.path.join(pkg_path, 'worlds' , 'nav_world.sdf' ) declare_model = DeclareLaunchArgument( name='model' , default_value=default_model_path, description='Path to URDF/XACRO model' ) robot_description_content = Command(['xacro ' , LaunchConfiguration('model' )]) robot_description = ParameterValue(robot_description_content, value_type=str ) gz_sim = ExecuteProcess( cmd=['gz' , 'sim' , '-r' , '-v' , '4' , default_world_path], output='screen' ) spawn_robot = TimerAction( period=2.0 , actions=[ Node( package='ros_gz_sim' , executable='create' , arguments=[ '-name' , 'my_robot' , '-topic' , 'robot_description' , '-x' , '0' , '-y' , '0' , '-z' , '0.3' ], output='screen' ) ] ) return LaunchDescription([ declare_model, Node( package='robot_state_publisher' , executable='robot_state_publisher' , parameters=[{'robot_description' : robot_description}], output='screen' ), gz_sim, spawn_robot, ])
gazebo harmonic 不能向 classic 那样直接建立一个场景, 这里给出一个示例场景.
我们放在项目的 wrolds 目录下, 并在 CMakeLists.txt 中加入.
1 2 3 install(DIRECTORY worlds DESTINATION share/${PROJECT_NAME} )
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 # nav_world.sdf <?xml version="1.0" ?> <sdf version ="1.7" > <world name ="nav_world" > <light name ="sun" type ="directional" > <cast_shadows > true</cast_shadows > <pose > 0 0 10 0 0 0</pose > <diffuse > 1 1 1 1</diffuse > <specular > 0.1 0.1 0.1 1</specular > <direction > -0.5 0.5 -1</direction > </light > <model name ="ground_plane" > <static > true</static > <link name ="ground_link" > <collision name ="ground_collision" > <geometry > <plane > <normal > 0 0 1</normal > <size > 20 20</size > </plane > </geometry > </collision > <visual name ="ground_visual" > <geometry > <plane > <normal > 0 0 1</normal > <size > 20 20</size > </plane > </geometry > <material > <ambient > 0.5 0.5 0.5 1</ambient > <diffuse > 0.7 0.7 0.7 1</diffuse > </material > </visual > </link > </model > <model name ="wall_front" > <pose > 2 0 0.5 0 0 0</pose > <static > true</static > <link name ="link" > <collision name ="collision" > <geometry > <box > <size > 0.2 4 1</size > </box > </geometry > </collision > <visual name ="visual" > <geometry > <box > <size > 0.2 4 1</size > </box > </geometry > <material > <ambient > 0.6 0.6 0.6 1</ambient > </material > </visual > </link > </model > <model name ="wall_right" > <pose > 0 2 0.5 0 0 0</pose > <static > true</static > <link name ="link" > <collision name ="collision" > <geometry > <box > <size > 4 0.2 1</size > </box > </geometry > </collision > <visual name ="visual" > <geometry > <box > <size > 4 0.2 1</size > </box > </geometry > <material > <ambient > 0.4 0.8 0.4 1</ambient > </material > </visual > </link > </model > <model name ="box_obstacle" > <pose > 1 1 0.25 0 0 0</pose > <static > true</static > <link name ="link" > <collision name ="collision" > <geometry > <box > <size > 0.5 0.5 0.5</size > </box > </geometry > </collision > <visual name ="visual" > <geometry > <box > <size > 0.5 0.5 0.5</size > </box > </geometry > <material > <ambient > 1 0.3 0.3 1</ambient > </material > </visual > </link > </model > <model name ="robot_spawn" > <pose > 0 0 0.01 0 0 0</pose > <static > true</static > <link name ="spawn_link" > <visual name ="dummy" > <geometry > <box > <size > 0.001 0.001 0.001</size > </box > </geometry > </visual > </link > </model > </world > </sdf >
4 标签 4.1 摩擦力设置 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 <?xml version="1.0" ?> <robot xmlns:xacro ="http://ros.org/wiki/xacro" > <xacro:macro name ="mul_wheel" params ="name parent xyz" > <xacro:property name ="wheel_mass" value ="0.1" /> <xacro:property name ="wheel_radius" value ="0.03" /> <link name ="${name}_link" > <visual > <geometry > <sphere radius ="${wheel_radius}" /> </geometry > <origin xyz ="0 0 ${wheel_radius}" rpy ="0 0 0" /> <material name ="gray" > <color rgba ="0.4 0.4 0.4 1" /> </material > </visual > <collision > <geometry > <sphere radius ="${wheel_radius}" /> </geometry > <origin xyz ="0 0 ${wheel_radius}" rpy ="0 0 0" /> </collision > <inertial > <origin xyz ="0 0 ${wheel_radius}" rpy ="0 0 0" /> <mass value ="${wheel_mass}" /> <inertia ixx ="1e-5" ixy ="0.0" ixz ="0.0" iyy ="1e-5" iyz ="0.0" izz ="1e-5" /> </inertial > </link > <joint name ="${name}_joint" type ="fixed" > <parent link ="${parent}" /> <child link ="${name}_link" /> <origin xyz ="${xyz}" rpy ="0 0 0" /> </joint > <gazebo reference ="${name}_link" > <mu1 > 0.01</mu1 > <mu2 > 0.01</mu2 > <material > Gazebo/Grey</material > </gazebo > </xacro:macro > <xacro:macro name ="wheel" params ="name parent xyz" > <xacro:property name ="wheel_mass" value ="0.3" /> <xacro:property name ="inertia_ixx" value ="${0.5 * wheel_mass * wheel_radius * wheel_radius}" /> <xacro:property name ="inertia_iyy" value ="${0.5 * wheel_mass * wheel_radius * wheel_radius}" /> <xacro:property name ="inertia_izz" value ="${0.5 * wheel_mass * wheel_radius * wheel_radius}" /> <link name ="${name}_link" > <visual > <geometry > <cylinder radius ="${wheel_radius}" length ="${wheel_width}" /> </geometry > <origin xyz ="0 0 ${wheel_radius}" rpy ="1.5708 0 0" /> <material name ="black" > <color rgba ="0 0 0 1" /> </material > </visual > <collision > <geometry > <cylinder radius ="${wheel_radius}" length ="${wheel_width}" /> </geometry > <origin xyz ="0 0 ${wheel_radius}" rpy ="1.5708 0 0" /> <material name ="black" > <color rgba ="0 0 0 1" /> </material > </collision > <inertial > <origin xyz ="0 0 ${wheel_radius}" rpy ="0 0 0" /> <mass value ="${wheel_mass}" /> <inertia ixx ="${inertia_ixx}" ixy ="0.0" ixz ="0.0" iyy ="${inertia_iyy}" iyz ="0.0" izz ="${inertia_izz}" /> </inertial > </link > <joint name ="${name}_joint" type ="continuous" > <parent link ="${parent}" /> <child link ="${name}_link" /> <origin xyz ="${xyz}" rpy ="0 0 0" /> <axis xyz ="0 1 0" /> </joint > <gazebo reference ="${name}_link" > <mu1 > 20.0</mu1 > <mu2 > 20.0</mu2 > <material > Gazebo/Black</material > </gazebo > </xacro:macro > </robot >
5 插件 对于 harmonic 所有版本, 我们进行仿真之前都需要区对应的 world 文件里加入对应的 plugin.
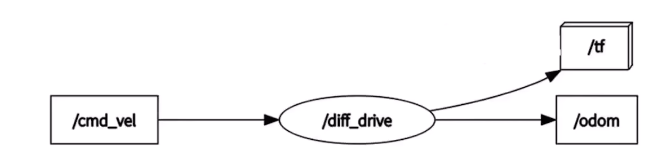
5.1 两轮差速插件 示例, 需要使用修改参数即可.
参数名
示例值
单位
说明
left_jointleft_wheel_joint-
左轮 joint 名称,需与 <joint> 中定义一致
right_jointright_wheel_joint-
右轮 joint 名称,需与 <joint> 中定义一致
wheel_separation0.4米(m)
左右轮中心间距,通常等于底盘宽度
wheel_diameter0.2米(m)
车轮直径
max_torque20牛·米(Nm)
每个轮子最大扭矩限制(控制电机强度)
max_accel1.0米/秒²(m/s²)
轮子的最大线性加速度
update_rate30Hz
插件刷新频率,越高越精细但计算负担也越大
odom_frameodom-
发布的里程计参考坐标系名称,通常为 odom
base_framebase_footprint-
机器人底部坐标系,通常绑定在底盘中心
publish_odomtrue / false布尔
是否通过 ROS 发布 /odom 消息
publish_odom_tftrue / false布尔
是否广播 odom 到 base 的 TF 变换
publish_wheel_tftrue / false布尔
是否广播轮子 joint 的 TF(调试用)
下面作为一个模板示例.
项目
Gazebo Classic
Gazebo Sim (Ignition)
插件文件
libgazebo_ros_diff_drive.sogz-sim-diff-drive-system
插件命名空间
ROS 接口(gazebo_ros)
Gazebo 内置 C++ 系统(gz::sim::systems)
ROS 集成方式
gazebo_ros_pkgs 提供
ros_gz 桥接话题
适用 ROS 版本
ROS 1 / ROS 2 <= Humble
ROS 2 Rolling / Jazzy / Iron
humble 版本.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 <?xml version="1.0" ?> <robot xmlns:xacro ="http://www.ros.org/wiki/xacro" > <xacro:macro name ="gazebo_control_plugin" params =" left_joint right_joint wheel_separation wheel_diameter max_torque max_accel update_rate odom_frame base_frame publish_odom publish_odom_tf publish_wheel_tf " > <gazebo > <plugin name ="diff_drive_controller" filename ="libgazebo_ros_diff_drive.so" > <ros > <namespace > /</namespace > <remapping > cmd_vel:=cmd_vel</remapping > <remapping > odom:=odom</remapping > </ros > <update_rate > ${update_rate}</update_rate > <left_joint > ${left_joint}</left_joint > <right_joint > ${right_joint}</right_joint > <wheel_separation > ${wheel_separation}</wheel_separation > <wheel_diameter > ${wheel_diameter}</wheel_diameter > <max_wheel_torque > ${max_torque}</max_wheel_torque > <max_wheel_acceleration > ${max_accel}</max_wheel_acceleration > <publish_odom > ${publish_odom}</publish_odom > <publish_odom_tf > ${publish_odom_tf}</publish_odom_tf > <publish_wheel_tf > ${publish_wheel_tf}</publish_wheel_tf > <odometry_frame > ${odom_frame}</odometry_frame > <robot_base_frame > ${base_frame}</robot_base_frame > </plugin > </gazebo > </xacro:macro > </robot >
我们可以直接使用.
1 2 3 4 5 6 7 8 9 10 11 12 13 <xacro:gazebo_control_plugin left_joint ="left_wheel_joint" right_joint ="right_wheel_joint" wheel_separation ="0.4" wheel_diameter ="0.2" max_torque ="15" max_accel ="2.0" update_rate ="50" odom_frame ="odom" base_frame ="base_footprint" publish_odom ="true" publish_odom_tf ="true" publish_wheel_tf ="false" />
harmonic 版本.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 <?xml version="1.0" ?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" > <!-- Gazebo Sim 差速驱动插件(gz::sim::systems::DiffDrive) --> <xacro:macro name="gazebo_control_plugin" params=" left_joint right_joint wheel_separation wheel_radius max_accel odom_topic cmd_vel_topic odom_frame base_frame odom_pub_freq " > <gazebo> <plugin name="gz::sim::systems::DiffDrive" filename="gz-sim-diff-drive-system" > <!-- 车轮 joint 名 --> <left_joint>${left_joint} </left_joint> <right_joint>${right_joint} </right_joint> <!-- 运动学参数 --> <wheel_separation>${wheel_separation} </wheel_separation> <wheel_radius>${wheel_radius} </wheel_radius> <max_linear_acceleration>${max_accel} </max_linear_acceleration> <!-- ROS 接口(通过 ros_gz_bridge 使用) --> <topic>${cmd_vel_topic} </topic> <odom_topic>${odom_topic} </odom_topic> <!-- TF 设置 --> <frame_id>${odom_frame} </frame_id> <child_frame_id>${base_frame} </child_frame_id> <!-- 发布频率 --> <odom_publisher_frequency>${odom_pub_freq} </odom_publisher_frequency> <tf_topic>/tf</tf_topic> </plugin> <plugin filename="gz-sim-joint-state-publisher-system" name="gz::sim::systems::JointStatePublisher" > <topic>joint_states</topic> <joint_name>${left_joint} </joint_name> <joint_name>${right_joint} </joint_name> </plugin> </gazebo> </xacro:macro> </robot>
1 2 3 4 5 6 7 8 9 10 11 <xacro:gazebo_control_plugin left_joint ="left_wheel_joint" right_joint ="right_wheel_joint" wheel_separation ="0.4" wheel_radius ="0.1" max_accel ="0.033" cmd_vel_topic ="cmd_vel" odom_topic ="odom" odom_frame ="odom" base_frame ="base_footprint" odom_pub_freq ="30" />
注意的是, 要想通过 ros2 topic 命令控制小车, 需要桥接 ros2 和 gazebo 的话题.
打开 Terminal 1 运行.
1 ros2 run ros_gz_bridge parameter_bridge /cmd_vel@geometry_msgs/msg/Twist@gz.msgs.Twist
打开 Terminal 2 运行.
1 2 3 4 ros2 topic pub -r 10 /cmd_vel geometry_msgs/msg/Twist '{linear: {x: 0.2}, angular: {z: 0.5}}' ros2 run teleop_twist_keyboard teleop_twist_keyboard
我们当然也可以使用 gazebo 原生的命令, 就不用桥接话题了.
1 2 3 gz topic -e -t /keyboard/keypress gz topic -t /cmd_vel -m gz.msgs.Twist -p '{linear: {x: 0.2}, angular: {z: 0.5}}'
5.2 激光雷达 classic 版本.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 <?xml version="1.0" ?> <robot xmlns:xacro ="http://www.ros.org/wiki/xacro" > <xacro:macro name ="gazebo_sensor_plugin" > <gazebo reference ="laser_link" > <sensor name ="laserscan" type ="ray" > <plugin name ="laserscan" filename ="libgazebo_ros_ray_sensor.so" > <ros > <namespace > /</namespace > <remapping > ~/out:=scan</remapping > </ros > <output_type > sensor_msgs/LaserScan</output_type > <frame_name > laser_link</frame_name > </plugin > <always_on > true</always_on > <visualize > true</visualize > <update_rate > 5</update_rate > <pose > 0 0 0 0 0 0</pose > <ray > <scan > <horizontal > <samples > 360</samples > <resolution > 1.000000</resolution > <min_angle > 0.000000</min_angle > <max_angle > 6.280000</max_angle > </horizontal > </scan > <range > <min > 0.120000</min > <max > 8.0</max > <resolution > 0.015000</resolution > </range > <noise > <type > gaussian</type > <mean > 0.0</mean > <stddev > 0.01</stddev > </noise > </ray > </sensor > </gazebo > </xacro:macro > </robot >
harmonic 版本.
直接内嵌到 link 里.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 <?xml version="1.0" ?> <robot xmlns:xacro ="http://www.ros.org/wiki/xacro" > <xacro:macro name ="lidar_sensor" params ="name parent xyz rpy" > <joint name ="${name}_joint" type ="fixed" > <parent link ="${parent}" /> <child link ="${name}_link" /> <origin xyz ="${xyz}" rpy ="${rpy}" /> </joint > <link name ="${name}_link" > <visual > <origin xyz ="0 0 0" /> <geometry > <cylinder length ="0.04" radius ="0.05" /> </geometry > <material name ="laser_material" > <color rgba ="0.13 0.13 0.13 1.0" /> </material > </visual > <collision > <origin xyz ="0 0 0" /> <geometry > <cylinder length ="0.04" radius ="0.05" /> </geometry > </collision > <inertial > <origin xyz ="0 0 0" rpy ="0 0 0" /> <mass value ="0.1" /> <inertia ixx ="1e-5" ixy ="0" ixz ="0" iyy ="1e-5" iyz ="0" izz ="1e-5" /> </inertial > </link > <gazebo reference ="${name}_link" > <sensor name ="${name}_link" type ="gpu_lidar" > <pose > 0 0 0 0 0 0 </pose > <always_on > true</always_on > <visualize > true</visualize > <update_rate > 10</update_rate > <topic > scan</topic > <gz_frame_id > ${name}_link</gz_frame_id > <lidar > <scan > <horizontal > <samples > 360</samples > <min_angle > -3.14</min_angle > <max_angle > 3.14</max_angle > </horizontal > <vertical > <samples > 1</samples > <resolution > 0.01</resolution > <min_angle > 0</min_angle > <max_angle > 0</max_angle > </vertical > </scan > <range > <min > 0.3</min > <max > 12</max > </range > </lidar > </sensor > </gazebo > </xacro:macro > </robot >
5.3 IMU harmonic 版本.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 <xacro:macro name ="imu_sensor" params =" parent_link child_link xyz rpy update_rate topic" > <link name ="${child_link}" > <inertial > <mass > 0.01</mass > <inertia > <ixx > 0.0001</ixx > <ixy > 0</ixy > <ixz > 0</ixz > <iyy > 0.0001</iyy > <iyz > 0</iyz > <izz > 0.0001</izz > </inertia > </inertial > </link > <joint name ="${child_link}_fixed_joint" type ="fixed" > <parent link ="${parent_link}" /> <child link ="${child_link}" /> <origin xyz ="${xyz}" rpy ="${rpy}" /> </joint > <gazebo reference ="${child_link}" > <sensor name ="${child_link}" type ="imu" > <always_on > 1</always_on > <update_rate > ${update_rate}</update_rate > <visualize > true</visualize > <topic > ${topic}</topic > </sensor > </gazebo > </xacro:macro >
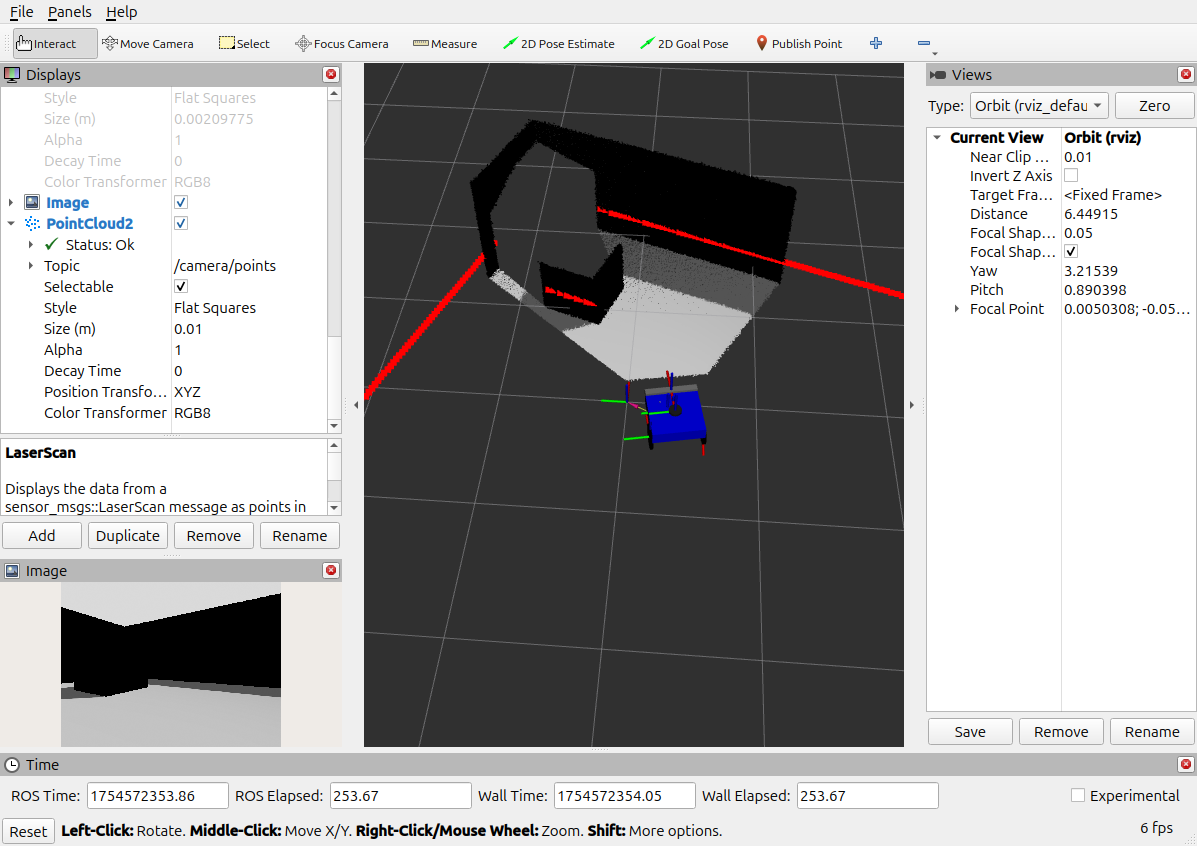
5.4 深度相机 harmonic 版本.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 <xacro:macro name ="imu_sensor" params =" name parent xyz rpy" > <link name ="${name}_link" > <visual > <origin xyz ="${xyz}" rpy ="${rpy}" /> <geometry > <box size ="0.01 0.01 0.01" /> </geometry > <material name ="${name}_material" > <color rgba ="0.63 0.63 0.63 1.0" /> </material > </visual > <inertial > <mass value ="0.01" /> <inertia ixx ="0.0001" ixy ="0.0" ixz ="0.0" iyy ="0.0001" iyz ="0.0" izz ="0.0001" /> </inertial > </link > <joint name ="${name}_joint" type ="fixed" > <parent link ="${parent}" /> <child link ="${name}_link" /> <origin xyz ="${xyz}" rpy ="${rpy}" /> </joint > <gazebo reference ="${name}_link" > <sensor name ="${name}_link" type ="imu" > <topic > imu</topic > <update_rate > 1</update_rate > <always_on > 1</always_on > <visualize > true</visualize > <gz_frame_id > ${name}_link</gz_frame_id > </sensor > </gazebo > </xacro:macro > <xacro:macro name ="depth_camera" params =" name parent xyz rpy" > <link name ="${name}_link" > <inertial > <mass value ="0.05" /> <inertia ixx ="0.0001" ixy ="0.0" ixz ="0.0" iyy ="0.0001" iyz ="0.0" izz ="0.0001" /> </inertial > <visual > <geometry > <box size ="0.05 0.4 0.04" /> </geometry > <material name ="CameraGray" > <color rgba ="0.5 0.5 0.5 1.0" /> </material > </visual > <collision > <geometry > <box size ="0.05 0.4 0.04" /> </geometry > </collision > </link > <joint name ="${name}_joint" type ="fixed" > <parent link ="${parent}" /> <child link ="${name}_link" /> <origin xyz ="${xyz}" rpy ="${rpy}" /> </joint > <gazebo reference ="${name}_link" > <sensor name ="${name}_link" type ="rgbd_camera" > <always_on > true</always_on > <visualize > true</visualize > <update_rate > 100</update_rate > <topic > camera</topic > <gz_frame_id > ${name}_link</gz_frame_id > <camera name ="${name}_link" > <camera_info_topic > camera/camera_info</camera_info_topic > <horizontal_fov > 1.3962634</horizontal_fov > <image > <width > 800</width > <height > 600</height > <format > R8G8B8</format > </image > <clip > <near > 0.1</near > <far > 100</far > </clip > <noise > <type > gaussian</type > <mean > 0</mean > <stddev > 0.007</stddev > </noise > </camera > </sensor > </gazebo > </xacro:macro >
6 常见桥接配置示例 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 from launch import LaunchDescriptionfrom launch_ros.actions import Nodeimport osfrom ament_index_python.packages import get_package_share_directorydef generate_launch_description (): config_path = os.path.join( get_package_share_directory('my_robot_description' ), 'config' , 'bridge_config.yaml' ) return LaunchDescription([ Node( package='ros_gz_bridge' , executable='parameter_bridge' , arguments=[ "--ros-args" , "-p" , f"config_file:={config_path} " , ], output='screen' ) ])
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 - ros_topic_name: "clock" gz_topic_name: "clock" ros_type_name: "rosgraph_msgs/msg/Clock" gz_type_name: "gz.msgs.Clock" direction: GZ_TO_ROS - ros_topic_name: "joint_states" gz_topic_name: "joint_states" ros_type_name: "sensor_msgs/msg/JointState" gz_type_name: "gz.msgs.Model" direction: GZ_TO_ROS - ros_topic_name: "odom" gz_topic_name: "odom" ros_type_name: "nav_msgs/msg/Odometry" gz_type_name: "gz.msgs.Odometry" direction: GZ_TO_ROS - ros_topic_name: "tf" gz_topic_name: "tf" ros_type_name: "tf2_msgs/msg/TFMessage" gz_type_name: "gz.msgs.Pose_V" direction: GZ_TO_ROS - ros_topic_name: "cmd_vel" gz_topic_name: "cmd_vel" ros_type_name: "geometry_msgs/msg/Twist" gz_type_name: "gz.msgs.Twist" direction: ROS_TO_GZ - ros_topic_name: "imu" gz_topic_name: "imu" ros_type_name: "sensor_msgs/msg/Imu" gz_type_name: "gz.msgs.IMU" direction: GZ_TO_ROS - ros_topic_name: "scan" gz_topic_name: "scan" ros_type_name: "sensor_msgs/msg/LaserScan" gz_type_name: "gz.msgs.LaserScan" direction: GZ_TO_ROS - ros_topic_name: "camera/camera_info" gz_topic_name: "camera/camera_info" ros_type_name: "sensor_msgs/msg/CameraInfo" gz_type_name: "gz.msgs.CameraInfo" direction: GZ_TO_ROS - ros_topic_name: "/camera/image" gz_topic_name: "/camera/image" ros_type_name: "sensor_msgs/msg/Image" gz_type_name: "gz.msgs.Image" direction: GZ_TO_ROS - topic_name: "/camera/depth_image" ros_type_name: "sensor_msgs/msg/Image" gz_type_name: "gz.msgs.Image" direction: GZ_TO_ROS - topic_name: "/camera/points" ros_type_name: "sensor_msgs/msg/PointCloud2" gz_type_name: "gz.msgs.PointCloudPacked" direction: GZ_TO_ROS
7 References